|
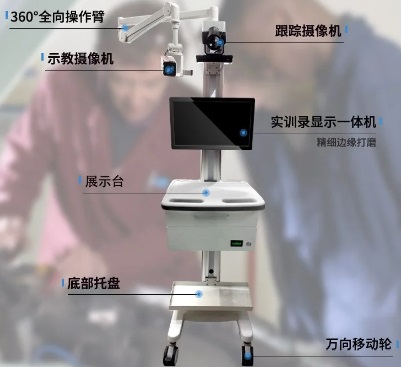
智能機器人與人工智能綜合應用與創(chuàng)新--Magician視覺套件
一�����、設備介紹
系統(tǒng)可以獨立完成多種自動化典型應用����,其中包括搬運�、碼垛、上下料�、視覺分揀等多種應用。在實際教學過程中�����,除通過傳統(tǒng)的PC��、APP�、WiFi等方式控制之外,還可以擴展PLC�����、ARM等方式,高度開放性的接口�����,能夠滿足多種教學�����、科研的需求���。
功能特點:
人手一機,操作簡單:體積精巧�����,一體化的設計�����,PC端控制�����、APP控制���、手勢控制�、無線控制等多種操作方式隨意切換,人手一機��,讓每個人通過實操練習獲得更好的學習體驗��;
二次開發(fā)���,拓展性強:預留13個拓展接口和一個可編程按鍵�,用戶可通過Dobot Studio控制軟件進行腳本編程來開發(fā)更多功能�����;
多種配件��,自由組合:可靈活搭配滑軌�、傳送帶、智能小車��、視覺等配件����,根據(jù)不同需求完成不同實驗項目;
課程實驗�����,趣味教學:豐富的實驗項目,完善的課程體系����,為大數(shù)據(jù)應用、智能工廠�、工業(yè)4.0等機器人教育的發(fā)展建設提供廣闊平臺;
安全可靠:相比于一般工業(yè)機械臂����,DOBOT具有更高的性價比,也跟具有安全性�,更加適合于教學使用�,而且操作界面友好更適合剛剛接觸機械臂的教學任務。
|
序號
|
實驗項目
|
序號
|
實驗項目
|
|
1
|
機械臂系統(tǒng)認識
|
7
|
機械臂程序編輯
|
|
2
|
機械臂基本參數(shù)設置
|
8
|
固定位置搬運:DOBOT智能機械臂通過在末端執(zhí)行器上更換為機械手爪���,可靈活抓取各種常規(guī)形狀的物件�。在控制器系統(tǒng)中進行編程�,實現(xiàn)物件的小范圍固定位置搬運
|
|
3
|
機械臂D-H模型認知
|
9
|
碼垛:DOBOT智能機械臂通過在末端執(zhí)行器上更換為吸盤,可以進行小物件的吸取�����,實現(xiàn)多個物件的碼垛任務。在控制器系統(tǒng)中進行編程�����,實現(xiàn)多個物件的碼垛任務
|
|
4
|
機械臂坐標系認知
|
10
|
相機標定:掌握相機標定方法��,計算機器人坐標系與視覺坐標系的映射
|
|
5
|
機械臂基本運動指令
|
11
|
視覺識別:DOBOT智能機械臂配上一套視覺識別套件�,實現(xiàn)對彩色物塊的分揀、搬運等多個任務
|
|
6
|
機械臂工具認知
|
|
|
|